维修价格面议
类型维修业务
维修好了能测试吗有测试设备可以测试好出货
品牌KEYENCE
维修范围全国
中文名字基恩士
苏州技优电子技术服务有限公司承接的维修设备有:进口工业相机维修,CCD相机维修,工业摄像机维修,CCD摄像机维修,伺服驱动器维修、变频器维修、电源维修、工控主板、驱动板、IO板、信号处理板、温度控制仪器、控制板、工控机、人机界面、触摸屏等自动化设备控制单元维修。公司拥有的电路板维修测试仪,维修技术团队成员都具备15+年以上设备维修实战经验,设备修复率高、维修交期短、无需原理图。主要维修的有BALSER、巴斯勒、teli、cognex、、康耐视、DALSA、Pointgrey、灰点、Flir、AVT、西门子、ABB、欧姆龙、伦茨、松下、富士、施耐德、法那科、安川、台达、东芝、三菱、百格拉等。公司客户行业涉及机械制造、注塑业、橡胶、电路板制造工厂、印刷、电梯、汽车生产、发电、电镀、、食品、包装等。
KEYENCE光透过式测量仪器
KEYENCE光透过式测量仪器LS-7000系列:高速 LED/CCD透过光束测量仪器高速线性CCD和远心光
学系统,每秒2400个样本的高速取样,免维修LED发射器和设计(无激光二管或马达),带统
计分析功能的高性能控制器,标准控制器便于操作。日本基恩士测量仪器 KEYENCE光透过式测量
仪器 KEYENCE测量仪器
KEYENCE光纤传感器,日本基恩士KEYENCE光纤传感器,KEYENCEKEYENCE光纤传感器非功能型传感
器是利用其它敏感元件感受被测量的变化, 光纤仅作为信息的传输介质,常采用单模光纤。光纤
在其中仅起导光作用,光照在光纤型敏感元件上受被测量调制。优点:无需光纤及其他
技术;比较容易实现,成本低。
光纤声传感器是一种利用光纤自身的传感器。当光纤受到一点很微小的外力作用时,会
产生微弯曲,而其传光能力发生很大的变化。声音是一种机械波,它对光纤的作用是使光纤受
力并产生弯曲,通过弯曲能够得到声音的强弱。光纤陀螺也是光纤自身传感器的一种,与激光
陀螺相比,光纤陀螺灵敏度高,体积小,成本低,可以用于飞机、舰船、等的高性能惯性导
航系统。如图是光纤传感器涡轮流量计的原理。
日本KEYENCE光纤传感器原理供应基恩士压力传感器KEYENCE光纤传感器光纤布拉格光栅传
感器(FBS)是一种使用频率高,范围广的光纤传感器,这种传感器能根据环境温度以及/或
者应变的变化来改变其反射的光波的波长。光纤布拉格光栅是通过全息干涉法或者相位掩膜法来
将一小段光敏感的光纤暴露在一个光强周期分布的光波下面。
光纤的光折射率会根据其被照射的光波强度而改变。这种方法造成的光折射率的周期性变
化叫做光纤布拉格光栅。 当一束广谱的光束被传播到光纤布拉格光栅的时候,光折射率被改
变以后的每一小段光纤只会反射一种特定波长的光波,这个波长称为布拉格波长,这种特性
使光纤布拉格光栅只反射一种特定波长的光波,而其它波长的光波都会被传播。
光纤传感器是近几年出现的新技术,可以用来测量多种物理量,比如声场、电场、压力、温度
、角速度、加速度等,还可以完成现有测量技术难以完成的测量任务。在狭小的空间里,在强电
磁干扰和高电压的环境里,光纤传感器都显示出了特的能力。目前光纤传感器已经有70多种,
大致成光纤自身传感器和利用光纤的传感器。
所谓光纤自身的传感器,是光纤自身直接接收外界的被测量。外接的被测量物理量能够引起测
量臂的长度、折射率、直径的变化,从而使得光纤内传输的光在振幅、相位、频率、偏振等方面
发生变化。测量臂传输的光与参考臂的参考光互相干涉(比较),使输出的光的相位(或振幅)
发生变化,根据这个变化可检测出被测量的变化。光纤中传输的相位受外界影响的灵敏度很高
,利用干涉技术能够检测出10的负4次方弧度的微小相位变化所对应的物理量。利用光纤的绕性
和低损耗,能够将很长的光纤盘成直径很小的光纤圈,以增加利用长度,获得更高的灵敏度。
基恩士倍受欢迎的图像识别传感器家族又新添一名成员,IV-H系列。本次全新IV-H系列图像识别
传感器提高了视觉检测的稳定性和功能性。
新的IV-H系列有两种型号:IV-H和IV-HG。提供彩色和黑白两种型。IV系列图像识别传感器
能够轻松应付高难度检测应用。对于要检测多个零件的应用,基恩士图像识别传感器通常能够取
代一体化解决方案中的多个传感器
全新IV-H型号拥有更高的稳定性和通用性,新追加了更多工具。而之前型号上的三种工具依
然保持很高的使用频率:用于形状和图案检测的轮廓工具;颜色和辉度检测的面积工具;用于补正
位置偏移的位置修正工具;基恩士扩展了新IV-H型号的工具。这些新工具提高了检测稳定性,增
加了IV应用数量。除了早期型号中的三种工具外,IV-H还包含以下新工具:宽度/高度检测、直
径检测、边缘存在验证、边缘像素工具(用于检测加工/抛光)。

KEYENCE基恩士CV-3001 CV-3000机械视觉检测系统KEYENCE基恩士CV-500 KEYENCE基恩士机械视
觉检测CV-5001 CV-5000影像系统KEYENCE基恩士CV-5501 CV-5500影像系统KEYENCE基恩士LS-
7601测微计KEYENCE基恩士KEYENCE基恩士电源MS2-H100 4.5A基恩士KEYENCE CV-5500机械视觉检
测系统LK-G3000 LK-G80H CCD KEYENCE基恩士激光位移传感器维修VE-V1 KEYENCE电子显微镜配
件MS2-H150 KEYENCE
网络分机构:广州,深圳,东莞,惠州,苏州,上海,北京,天津,宁波,杭州,沈阳,郑州,
哈尔滨,长春,成都..
基恩士电源6.3A XG-7700 KEYENCE基恩士影像系统CV-020.CV-022.CV-022H.CV-025.CV-030.CV-
035C.CV-035M.CV-050.CV-070.CV-100.CV-2000.CV-200C.CV-200M.CV-2100P.CV-2100.CV-
2500.CV-2600P.CV-300.CV-3000.CV-3500.CV-500.CV-550.CV-700.CV-701P.CV-750.CV-
751P.CV-C1.CV-C3.CV-C3R.CV-C7R.CV-C10.CV-C12R.CV-C17.CV-F01.CV-F02.CV-F03.CV-
F10.CV-H1N.CV-M10.CV-M30.CV-M1G.CZ-10.CZ-11.CZ-12.CZ-13.CZ-40.CZ-41.CZ-60.CZ-
H32..CZ-H35S.CZ-H35.CZ-H37S.CZ-H37.CZ-H52.CZ-H72.CZ-V1.CZ-V21CV-020.CV-022.CV-022H.

第三个是精度方面。在工业机器人里面,计算机视觉的辨识精度一定是在毫米级以下的,这里面
包括一个静态的辨识精度,一个动态的辨识精度,静态指的是相机或者观测物品相对处在一个静
止的状态,它这个时候的辨识精度取决于相机的分辨率,包括物品的边缘是否清晰,差异化是否
很明确,这个时候精度甚至可以达到微米级以下,服务机器人据我所知,大部分的精度并很
高,可能会在厘米级以上。
第四个是在工作空间上的范围。工业机器人的视觉辨识的空间,一种是把相机固定,视觉(相机
)的大小是根据我的安装空间导致视觉的分辨率有所限制;但服务机器人的工作空间,我的理解
它的工作空间限于电池能持续多久。
第五个是性。工业机器人上的视觉部分是要求不太会被人所干扰的,尽量避免人和设备的不
必要交互,但在服务机器人上,人和设备的地方多,这是视觉是人和服务机器人交互的一个
很重要的途径。另外一个是生命周期,这里面涉及到我视觉系统里的光源,相机安装的可靠性。
那总的来讲,计算机视觉在工业机器人和服务机器人重要的差异,我觉得主要是在精度和可靠
性方面。然后剩下的是应用场景的的功能需求。
Q: 工业机器人机器视觉传感器近有什么新进展?
先简单地列举一些视觉在工业机器人里的应用:用的多的是辨识物体的位置,方向,然后配合
机器人进行抓取,一般精度要到0.01毫米左右。
我认为工业机器人的视觉传感器是工业机器人的整个视觉传感系统,这里面考虑的大部分都是
可靠性和维护性,在真正的使用中,新的硬件方案或者新的产品并不是很快会进行导入的,它
都会需要一个长期的检测过程,我们说的视觉系统一般包含相机,镜头,光源还有一些视觉的处
理器,近几年smart camera这种传感器算是用的比较多的。
smart camera大部分的用法都会选用一些PC base的用法,典型的是基恩士,康耐视或者欧姆
龙,他们的视觉开始都是在PC上,利用对数字相机像的采集处理,然后利用一些视觉算法输出
数据,近几年,基恩士先把它的smart camera把它大量应用在苹果公司相关的一些检测设备
中。
由于激光特性的不同,如果玻璃厚度以亚微米级别变化,则透明量会受到影响。LV-S62与LV-
S63均配有新开发的不受这些细微倾斜影响的激光驱动电路。
LV-S超小型数字式激光传感器长距离透明物体检测器
受光面(约32 x15mm),使反射光亮度级别达到平衡。这样可以稳定检测透明物体。
装配安装支架(附件)时能够稳定检测物体的原因
由于在透明物体检测中光线量差异减小,因此稳定的受光量尤为重要。
不同的光束形状
区域光点在处理产品间隙方面效果优异。
与小光点型相比,区域光点型受反射镜光线量变化的影响较小,所以它可以阻止因振动与温
度变化所引起的光点位移。采用了光线量变化少的反射镜 (R-6L, R-9)。
平行光束区域光点
小光点:位置偏移时光线量变化大
区域光点:位置偏移时光线量变化小
叠加驱动电路可抑制透明物体上光线量的变化。
由于激光特性的不同,如果玻璃厚度以亚微米级别变化,则透明量会受到影响。(在亚微米
级别上,细微的倾斜可导致透明量改变。)LV-S62与LV-S63均配有新开发的不受这些细微倾斜影
响的激光驱动电路。
叠加驱动电路
大多数激光器使用单一波长,LV-S62/S63 则使用叠加技术,可以获取的波长范围更大
。这可以在实际应用中消除透明量的变化。
LV-11SB/12SB放大器 世界的零位功能
放大器可消除光线量变化。
零位功能在没有透明物体时始终监视受光量并使显示值保持为0(光线量变化消除)。如果
有透明物体进入检测区域,此功能将显示变化差异。此功能为世界,只需轻松操作即可让传
感器完成复杂工作。
基恩士倍受欢迎的像识别传感器家族又新添一名成员,IV-H系列。本次全新IV-H系列像识别传感
器提高了视觉检测的稳定性和功能性。
新的IV-H系列有两种型号:IV-H和IV-HG。提供彩色和黑白两种型。IV系列像识别传感器能够轻
松应付高难度检测应用。对于要检测多个零件的应用,基恩士像识别传感器通常能够取代一体化
解决方案中的多个传感器
在原有的DATUM 模式上增加了接收光强度,这样就使LR-ZB250AN/ZB250AP 型能够根据返回到传感器上的受光量,并且参考固定的背景位置来对工件进行检测。这就意味着即使CMOS 受光峰值在部件存在时仍维持在基准位置,还是可以检测工件。
同类放大器内置型产品中检测能力
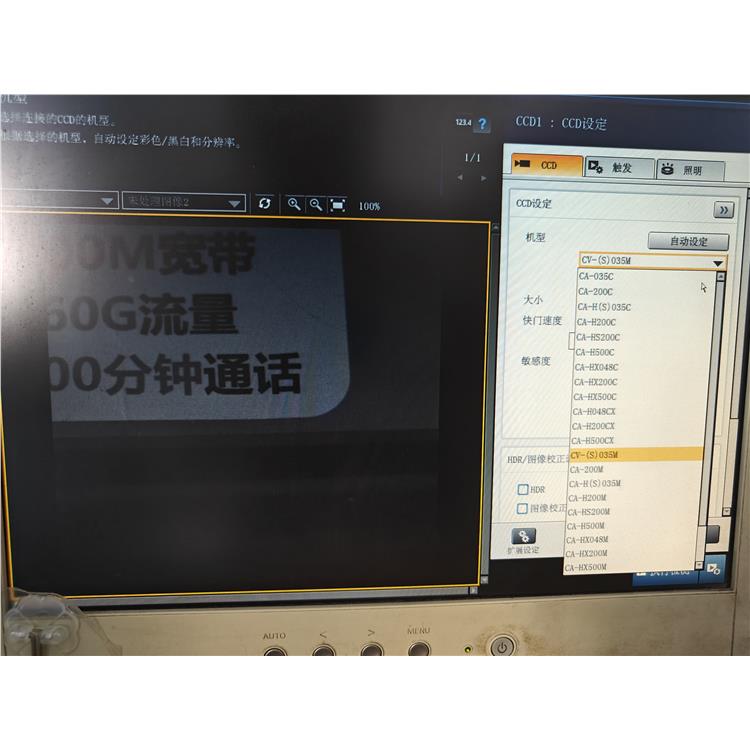
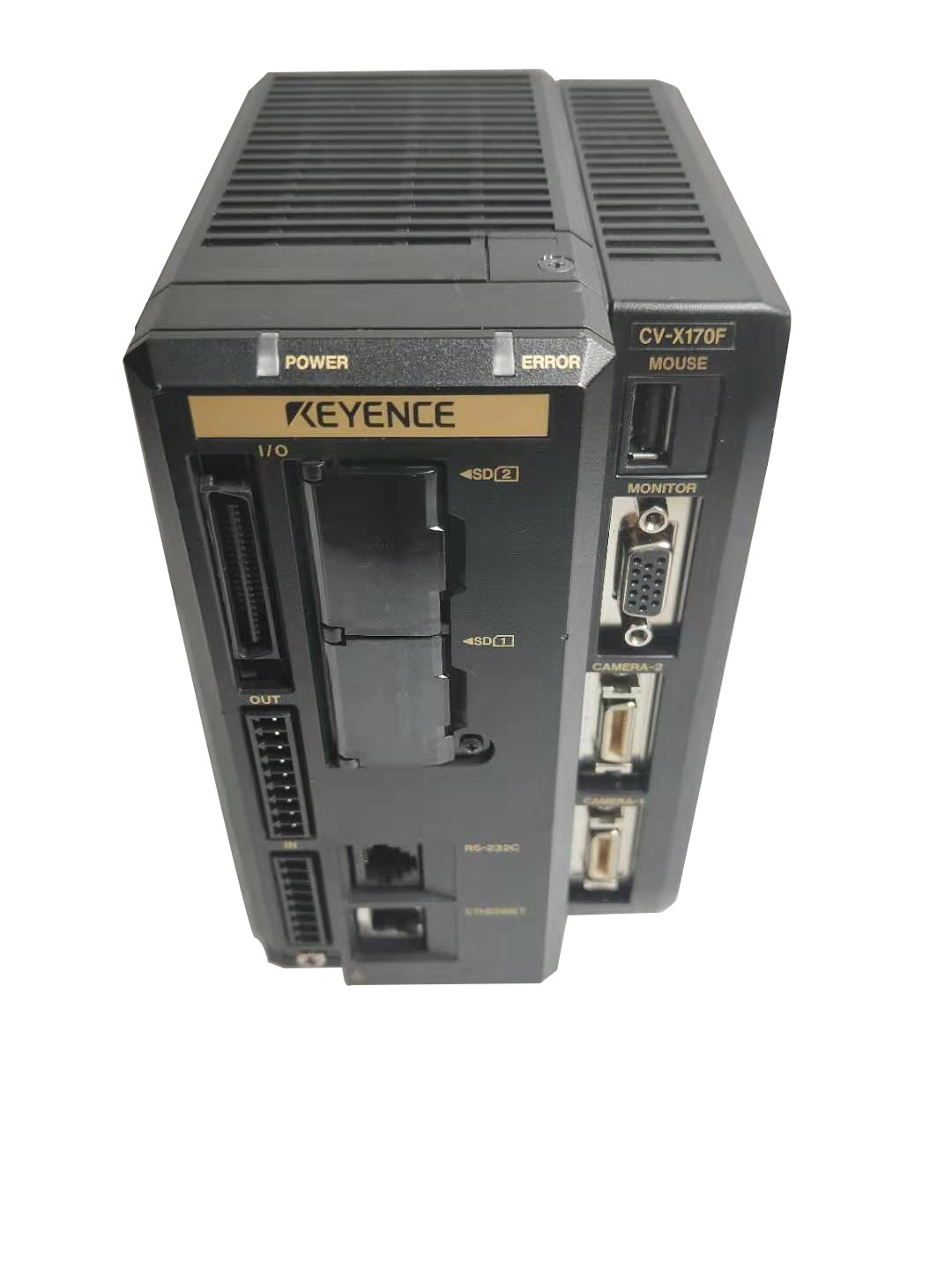
苏州技优电子技术服务有限公司有基恩士工业相机维修经验丰富,工程师有15年以上的大型工控视觉系统设备维修经历,修好有测试平台可以测试好,能保证让你收到就可以直接上机使用,修复率95%以上,可以快速维修好工业相机和基恩士KEYENCE视觉控制器。
http://www.dianlubanweixiu.cn