有无图像没图像
是否黑屏黑屏,白屏,花屏
是否亮灯亮红灯
是否开机不开机
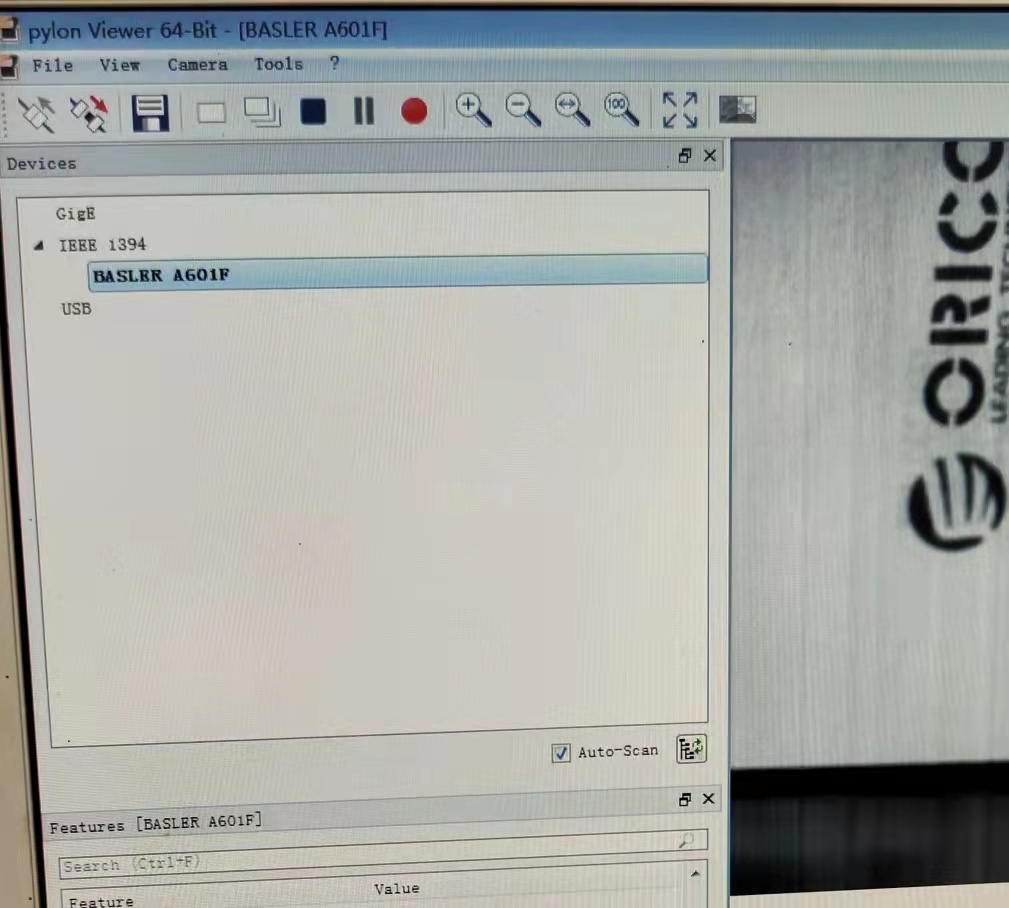
故障设备找不到相机
Basler Pylon工业相机SDK的使用
Pylon库有C++ .Net等各种封装版本,一般用C++版本,功能全面效率高,但对于不同接口(GigE USB3.0 CameraLink)的相机必须对应使用不同的类,之间不能通用。
基于GenAPI通用相机抽象接口使用的是Node结构,以字符串形式访问相机参数,可以统一管理不同接口类型的相机。但效率低,使用不方便。
Pylon高层用C++封装,形成本地相机对象
如何管理多个相机,靠谱的方法是按相机ID标定顺序,需要读一个配置文件,比如XML或JSON,然而一开始不知道ID,需要先列举出来。
1、走在前端的智能理念——无人充电机器人
ALSONTECH(埃尔森智能科技)于2018年推出全球套机器人3D视觉引导无人快速充电系统,将智能充电机器人变成现实。
该系统采用Basler集小巧机身和功能于一体的工业相机,搭建出3D视觉作为机器人的“双眼”,帮助机器人定位充电端口,之后该系统会引导充电体自动实现快充操作,结束后机器人甚至可以自动关闭充电盖。借助无人充电机器人,停车场可实现高度智能自动化。从车辆停至充电站到充电完成,整个过程驾驶员无需进行任何干预操作,有效缩短等待时间,省时省力。
随着无人驾驶技术在全球范围内推广应用,车辆使用方式面临着巨大变革。该项目着眼于汽车工业发展的未来,以“人工智能”为核心理念,采用更加的充电方式为车辆提供能源**,助力无人驾驶行业的产品升级。

编程模型和流程
对于相机来说,常见编程时我们关注三个对象——相机对象、采集对象、参数对象。
相机对象(Camera Object):负责相机的连接、断开等工作。
采集对象(Grab Streamer):负责相机的采集队列分配、相机单帧、连续采集。
参数对象(Parameter Object):负责相机参数的设置。
不同的SDK可能安排不一样,一般来说要不是三种对象的功能合并到“相机对象”中,要不是分为三种对象,其实采集对象和参数对象都是在“相机对象”上封装而来。

工业相机中断响应如何操作?
当相机一帧采集完成后,自动跳转进入中断回调函数,这里分了两种中断回调函数。
种为简单的取Buffer->处理->放回。
第二种结合Windows的消息队列,在此处再给一个“处理队列”,给处理一个缓冲时间。
这里的处理包括常见的图像处理、计算和显示及RawData拼装为图像等用到Buffer的地方。
前面也说过,常用的是中断响应处理,除此之外,自己去查询Buffer填充状态并作相关同步操作在某些场合也会用到,这个请查询不同相机SDK给出的同步方案。
差不多所有的工业相机SDK都是这样的编程模型和流程,AVT 1394相机和Basler Camera Link相机和AVT GigE相机相关代码在笔者网站可下载,还有之前讲的Basler Pylon SDK相机编程,他们基本流程都是一样,恕不详述!
http://www.dianlubanweixiu.cn